1 / 5
| Item | Specification |
|---|---|
| Step Angle Accuracy | ±8%(full step, no load) |
| Resistance Tolerance | ±10% |
| Inductance Tolerance | ±20% |
| Temperature Rise | 80.C Max.(rated current,2 phase on) |
| Ambient Temperature | -20.C~+50.C |
| Insulation Resistance | 100MΩ Min. ,500VDC |
| Dielectric Strength | 600VAC , 1s , 3mA |
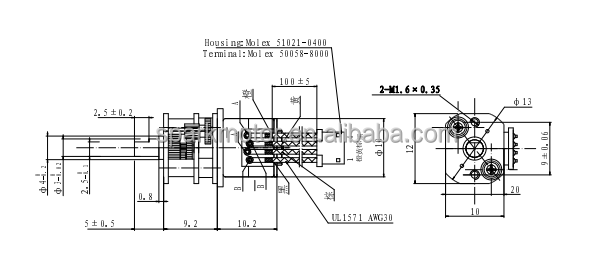
| Model No. | Voltage (VDC) | No. of Phase | Step Angle (Deg.) | Gear Ratio | Winding Resistance (Ω) | Max. Pull-in Rate (PPS) | Pull-in Torque at 500PPS |
|---|---|---|---|---|---|---|---|
| PG10S-020-501/100 | 5 | 2 | 18/100 | 1/100 | 40 | 1200 | 300 g.cm |
| PG10S-020-03/20 | 5 | 2 | 18/20 | 1/20 | 19 | 1100 | 70 g.cm |
| PG10S-020-02/50 | 5 | 2 | 18/50 | 1/50 | 19 | 1100 | 130 g.cm |
| PG10S-020-02/100 | 5 | 2 | 18/100 | 1/100 | 19 | 1100 | 250 g.cm |
| PG10-020-01/1000 | 5 | 2 | 18/1000 | 1/1000 | 19 | 1250 | 5 kg.cm |
| PG15S-020-111/380(A) | 5 | 2 | 18/380 | 1/380 | 10 | 1100 | 2500 |
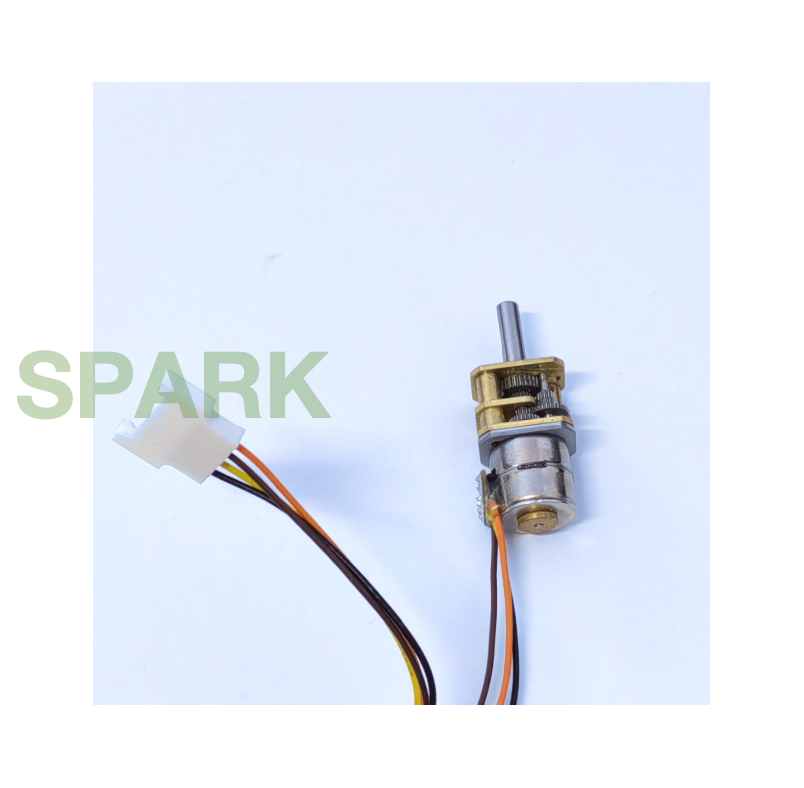
Our stepper motors provide exceptional accuracy and torque for demanding applications:

Wide Applications: Valve control, Clinical Diagnostics, CCTV systems, Printers, Copiers, Pharmaceutical dispensing, Robotics Antenna positioning.

Our Markets: Active in more than 20 countries and territories worldwide with high client satisfaction.

Operating from a strong industrial base with a complete supply chain, we manage two manufacturing sites covering a total area of 8000㎡. With 6 automated production lines and 120 employees, we bring over 20 years of experience in the Micro PM motor and DC gear motor industry. Our continued dedication to R&D, quality control, and client service has earned recognition from clients in over 20 countries.
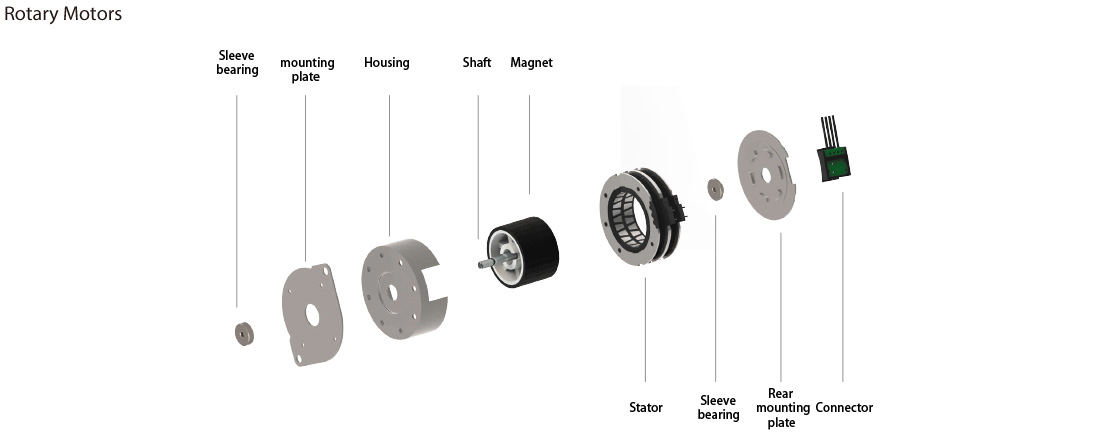
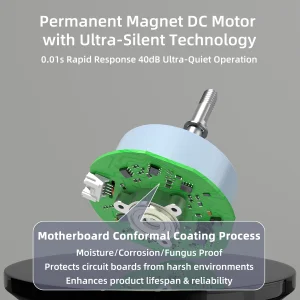
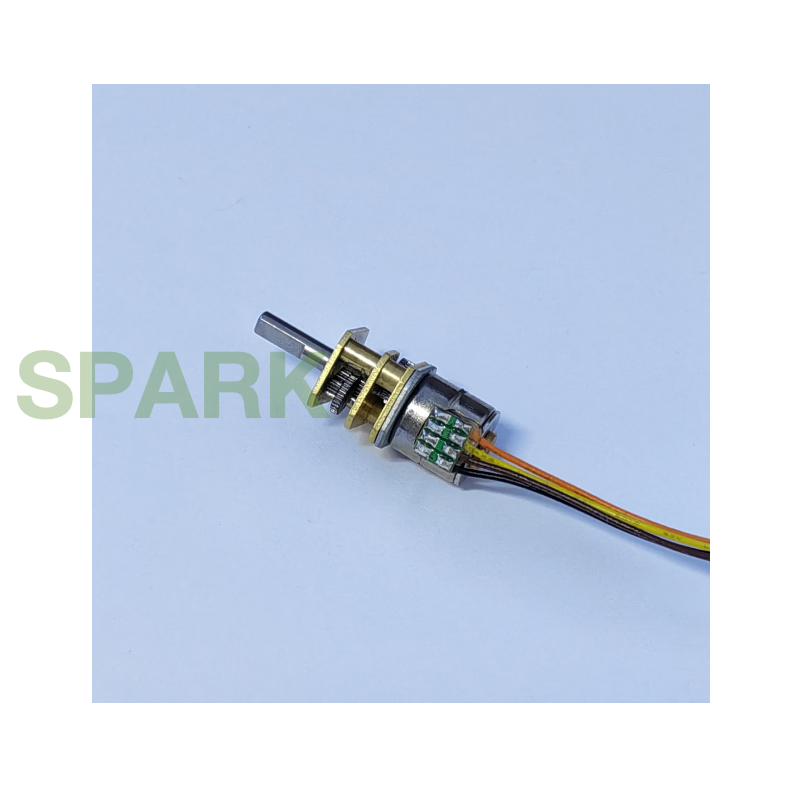
A PM stepper motor is an electric motor that uses the magnetic field from coil current to interact with the rotor's magnetic field, enabling precise forward or reverse rotation. Step angles typically range from 3.75 to 18 degrees.
Key metrics include the Start/Stop region (where the motor can directly trigger motion) and the Slew Range (where the motor requires acceleration/deceleration to prevent step loss).
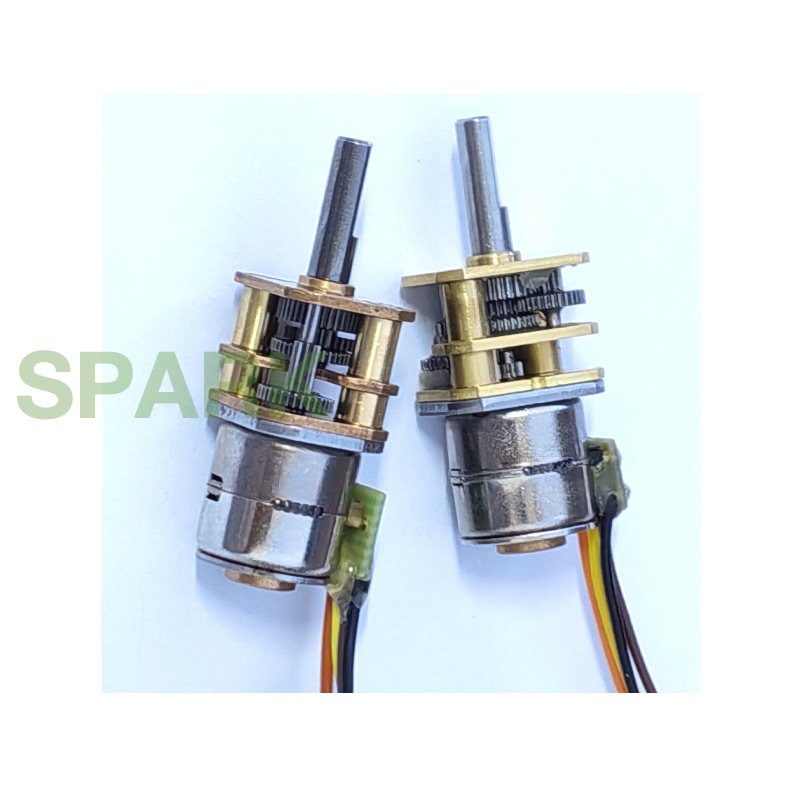
The number of magnet poles and claws per stator determines the step angle. For example, 10 poles with 5 claws result in an 18° step angle, while 24 poles with 12 claws result in a 7.5° step angle.
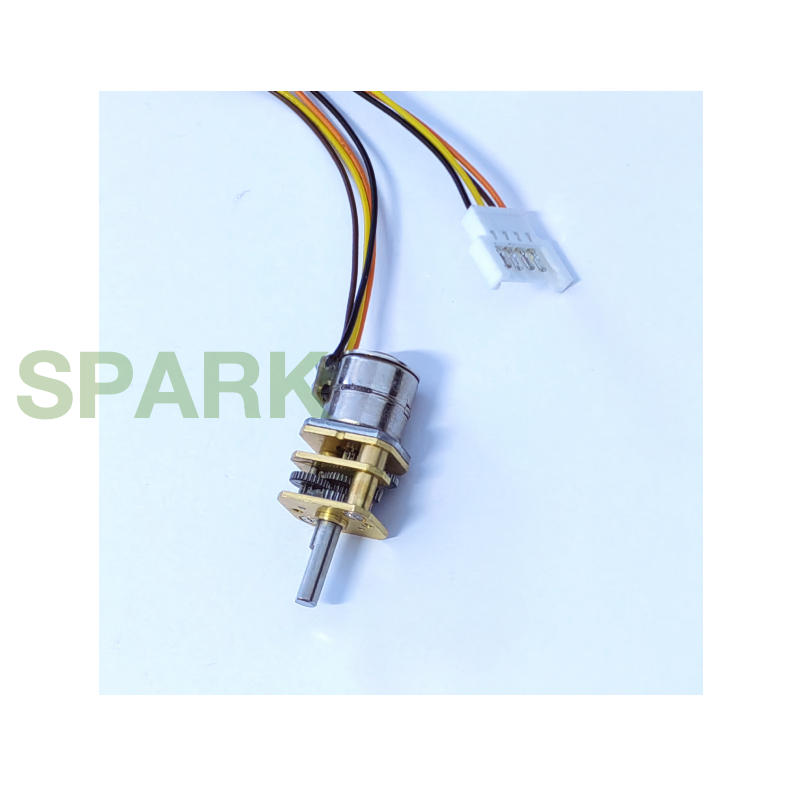
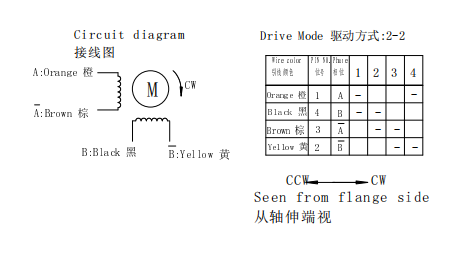
Bipolar motors use a single winding per phase and require current reversal, offering 40% more torque. Unipolar motors use two windings per phase, simplifying the driver circuitry with only four electronic switches.
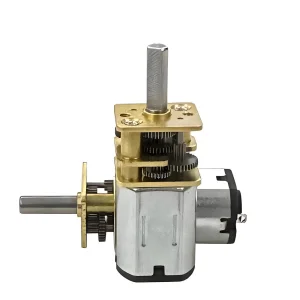
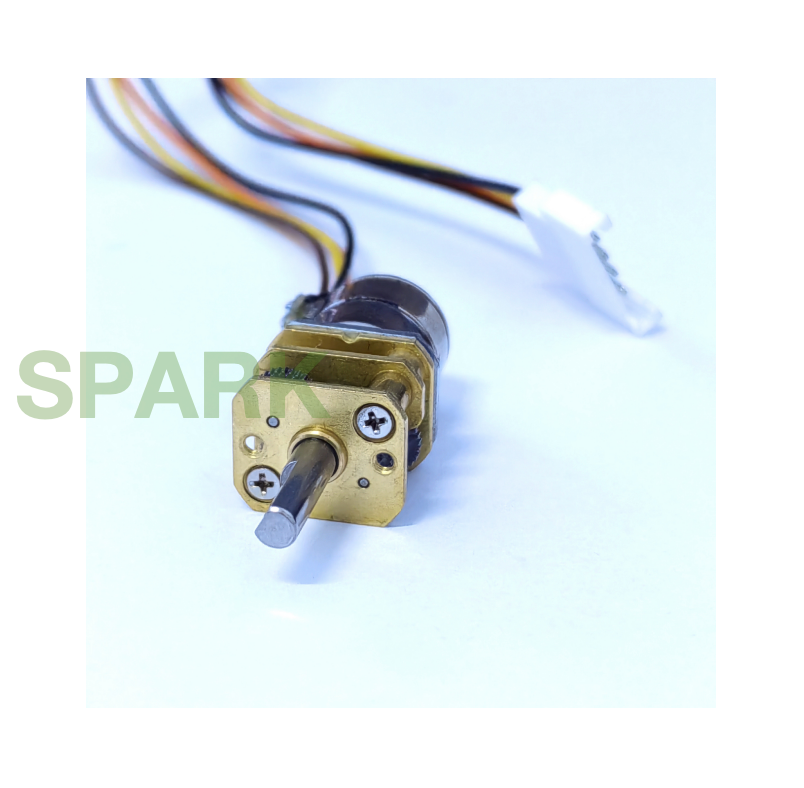
Gearboxes (Spur, Planetary, or Worm) reduce output speed while increasing torque. For instance, halving the speed can roughly double the output torque, making it suitable for high-load applications.
Focus on Torque (Holding and Running), Precision (Step Angle), Size (NEMA standards), and Environmental Protection (IP ratings). Always calculate required torque with a 30-50% safety margin.